工业控制领域的核心之一——运动控制系统
运动控制是工业控制领域的核心之一,在焊接、抛光、封装、装配等工业场景中发挥着重要作用。运动控制起源于更早的电机控制。电机控制的任务是控制单个电机的转矩、速度、位置等参数,使电机完成规定的动作。运动控制以电机控制为基础,控制系统自动协调多个电机完成指定的运动。复杂精密运动控制系统的应用可以大大降低生产成本,减少加工中误操作的发生,提高产品质量。如今,随着工业生产自动化技术的快速发展,各种运动控制系统被广泛应用于物流行业和大型装配生产线。
比如频繁出现在我们视野中的机械臂,就是运动控制系统帮助工业生产的关键环节。目前世界上先进的机械臂有七个无齿轮关节,每个电机驱动一个关节运动。当机械臂正常运行时,运动控制系统同时协调7个电机,机械臂可以轻松抓取空间任意位置的物体。不仅如此,它还可以实现其他复杂的功能,甚至可以帮助人们清理或演奏乐器。
几年前,互联网上的扫地机器人是运动控制的一个缩影。当扫地机器人制定好运动路线后,运动控制系统会驱动电机执行不同的动作,使扫地机器人高效完成任务。在工厂里,机械臂被广泛用于装配线。在汽车生产线上,机械臂可以轻松举起几十公斤甚至几百公斤的零件,完成焊接和装配。我们可以看到,运动控制系统不仅应用在工业上,也存在于我们的生活中。
为了理解运动控制系统,理解运动命令的执行者——马达是很重要的。运动控制系统中使用的大多数电机是步进电机和伺服电机。下面简单介绍两种电机。
一、步进电机
步进电机可以将输入的脉冲信号转换成角位移。在步进电机正常运行的情况下,电机的转速、位置、加减速只取决于脉冲信号的频率和个数,不受负载变化的影响。当步进电机驱动器接收到脉冲信号时,他驱动步进电机在设定的方向旋转一个固定的角度。它被称为“步进角”,它的旋转是一步一步进行的,每一步旋转一个步进角,因此得名步进电机。
伺服电机将接收到的电信号转换成电机轴上的角位移,伺服电机驱动器控制三相电形成电磁场,转子在磁场的作用下旋转。伺服电机的编码器将信号反馈给驱动器,驱动器将反馈值与目标值进行比较,以调整转子的旋转角度。那么伺服电机和步进电机有什么区别呢?
1.不同的控制方法
步进电机采用开环控制,伺服电机采用闭环控制。两种控制方式的区别在于闭环控制将目标值与实际值进行比较,调整电机位置。相比之下,伺服电机的控制精度优于步进电机。
2.不同的控制精度
步进电机的相位越多,精度越高。两相电机成本低,但低速时振动大,高速时转矩下降快。5相电机振动较小,高速性能好,比2相电机高30~50%,在某些场合甚至可以替代伺服电机。伺服电机有自己的编码器,编码器的刻度越多,精度越高。通常情况下,伺服电机的精度相当于步进角为0.036度的步进电机,但没有步进角这么小的步进电机。一般步进电机的步距角为1.8°,这只是一个类比。因此,在实现高精度运动控制时,伺服电机的性能远远超过步进电机。
3.不同的低频特性
与伺服电机不同,步进电机会采用阻尼技术或细分技术来克服低速时的低速振动现象。步进电机在低速时仍然容易振动,而伺服电机在高速或低速时不会振动。
4.不同的运动表现
步进电机采用开环控制,启动频率过高或负载过大时容易造成失步现象,停止时转速过高容易出现超调现象。伺服电机采用闭环控制,伺服驱动器可以直接采样电机编码器的反馈信号,内部形成速度环和位置环,一般不会出现失步或超调现象。
5.速度也相应不同
步进电机从静止加速到工作速度需要几百毫秒,而伺服电机一般只需要几毫秒,可用于需要快速启停的控制场合。
从上面的对比来看,伺服电机在很多性能方面都要优于步进电机,所以我们在选择电机型号的时候,应该选择全伺服电机。事实并非如此。伺服电机的价格会比步进电机高很多,从性价比上来说步进电机会战胜伺服电机。在掌握了两种电机的特点后,根据不同的需求选择合适的电机类型就显得尤为重要。
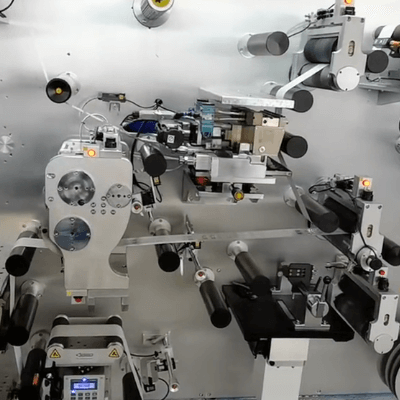
运动控制系统不仅由电机和驱动器组成,更重要的是控制和协调多个电机运动的控制方案或算法。比如有这样一个运动系统,由两个电机驱动的转盘被薄膜覆盖。为了实现薄膜可以从一个转盘上展开,然后以设定的薄膜卷绕速度卷绕到另一个转盘上而不会断裂。在薄膜卷绕过程中,两个转盘的卷绕直径会不断变化。为了保证薄膜不断裂,满足规定的薄膜卷绕速度,需要不断调整两个电机的转速,这就需要PID算法和闭环控制,使被控对象的反馈值:张力影响电机的转速。这样,依靠伺服电机的快速响应性能,在张力过高时降低转速,在张力过低时加速。在不断调整下,薄膜的张力和卷绕速度满足要求。
在6自由度甚至7自由度机械手控制系统中,不仅会用到PID算法,还会用到运动补偿算法,以保证机械手运行到指定位置。运动控制系统的方案决定了系统是否安全、可靠、高效。拥有优秀的设计能力会让我们更有竞争力。
上一条:没有了!
下一条:运动控制系统的未来展望